踝关节康复机器人本体感觉训练对中风患者下肢功能的影响
浙江省中医院第一附属医院开展了一项康复临床研究,实验过程中使用了傅利叶智能AnkleMotus M1A踝关节康复机器人产品。




浙江省中医院第一附属医院开展了一项康复临床研究,旨在验证使用康复机器人是否可以实现本体觉康复并优于传统康复效果,实验过程中使用了傅利叶智能AnkleMotus M1A踝关节康复机器人产品。相关研究成果已发表于Froniers in Neurorobotics (工程技术3区 机器人学Q2)2022年10月26日第16期。

01 背景
本体感觉(又称深感觉)对于我们的日常活动至关重要,它能够传达身体的位置、运动和力量信息。尤其对于中风患者来说,本体感觉的恢复对康复至关重要。本研究旨在探讨中风患者进行踝关节康复机器人辅助下的本体感觉训练,对下肢功能的影响。
02 研究方法
研究采用随机对照试验,共收录60名成年参与者,随机分为控制组(RG)和实验组(SG)。控制组接受传统的运动疗法,包括关节牵伸、肌力训练和肌耐力训练。而实验组在此基础上进行踝关节康复机器人引导的本体感觉训练。治疗持续6周,每天一次,每周5天,共30次。通过对10米步行时间、Berg平衡量表、Fugl-Meyer下肢评估、主动关节活动范围(AROM)和被动关节活动范围(PROM)的测量,实验可评估治疗前后的效果。
其中本体感受训练的实验设置如下:
参与者坐在距离M1A约20-30公分的可升降椅上,治疗师将其患侧脚绑在踏板上。设置踝关节中立位为起始0°位置(如下图1)。
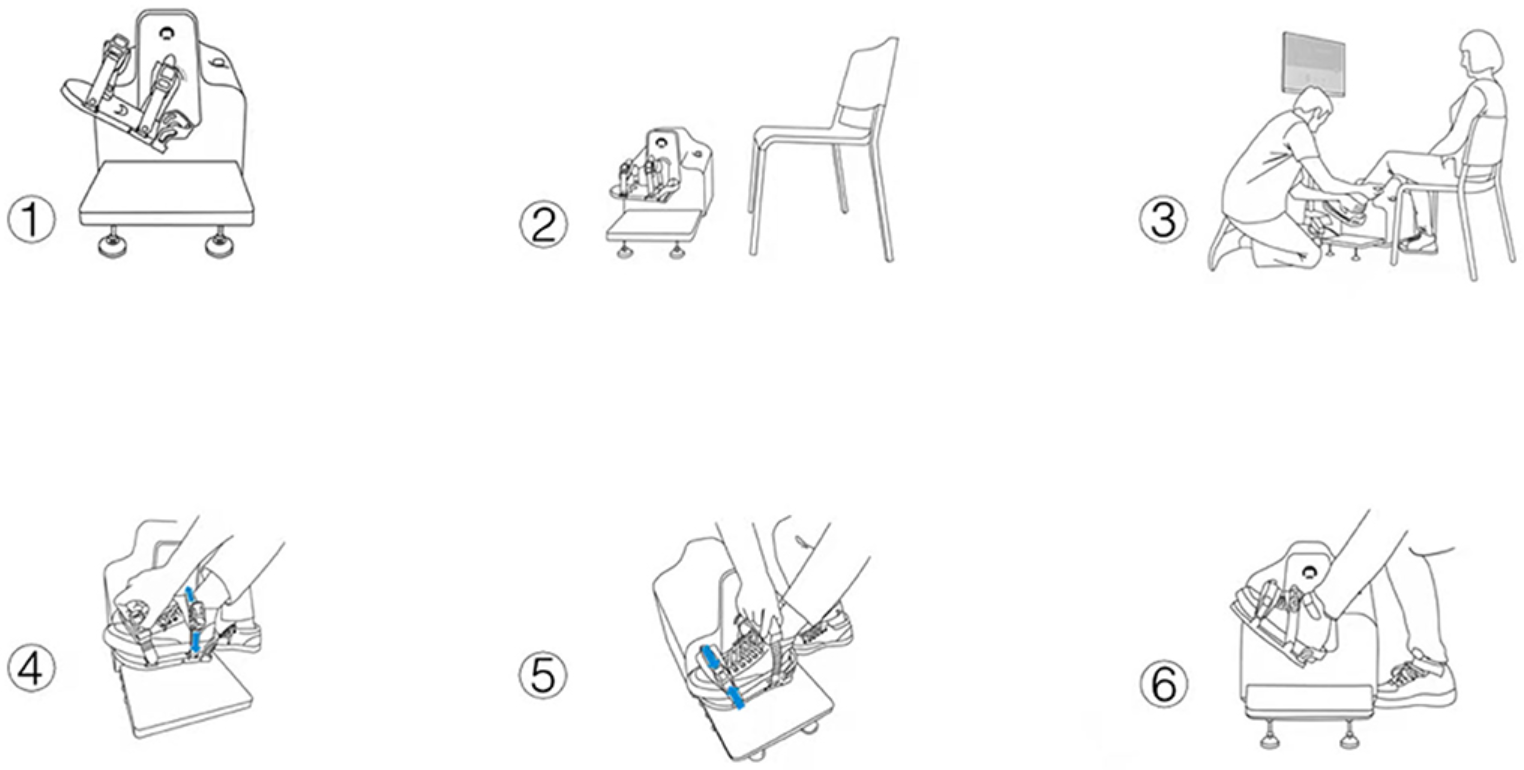
图1 受试者相对设备体位
本体感觉训练包括关节位置觉训练和关节运动觉训练。在关节位置觉训练中,实验者使用M1A的牵伸模式(如下图2),并设置活动范围为机器人评估后最大PROM基础上增加3°,完成单方向牵伸后回归至初始位置。
在关节运动觉训练中,M1A提供给受试者1°/s角速度的被动训练,持续10分钟。随后,受试者观看踝关节的运动并进行被动训练,然后闭上双眼进行相同的训练容量。该模式中,治疗师会提示受试者脚踝实时移动的位置,让受试者尝试建立位置觉及运动觉。
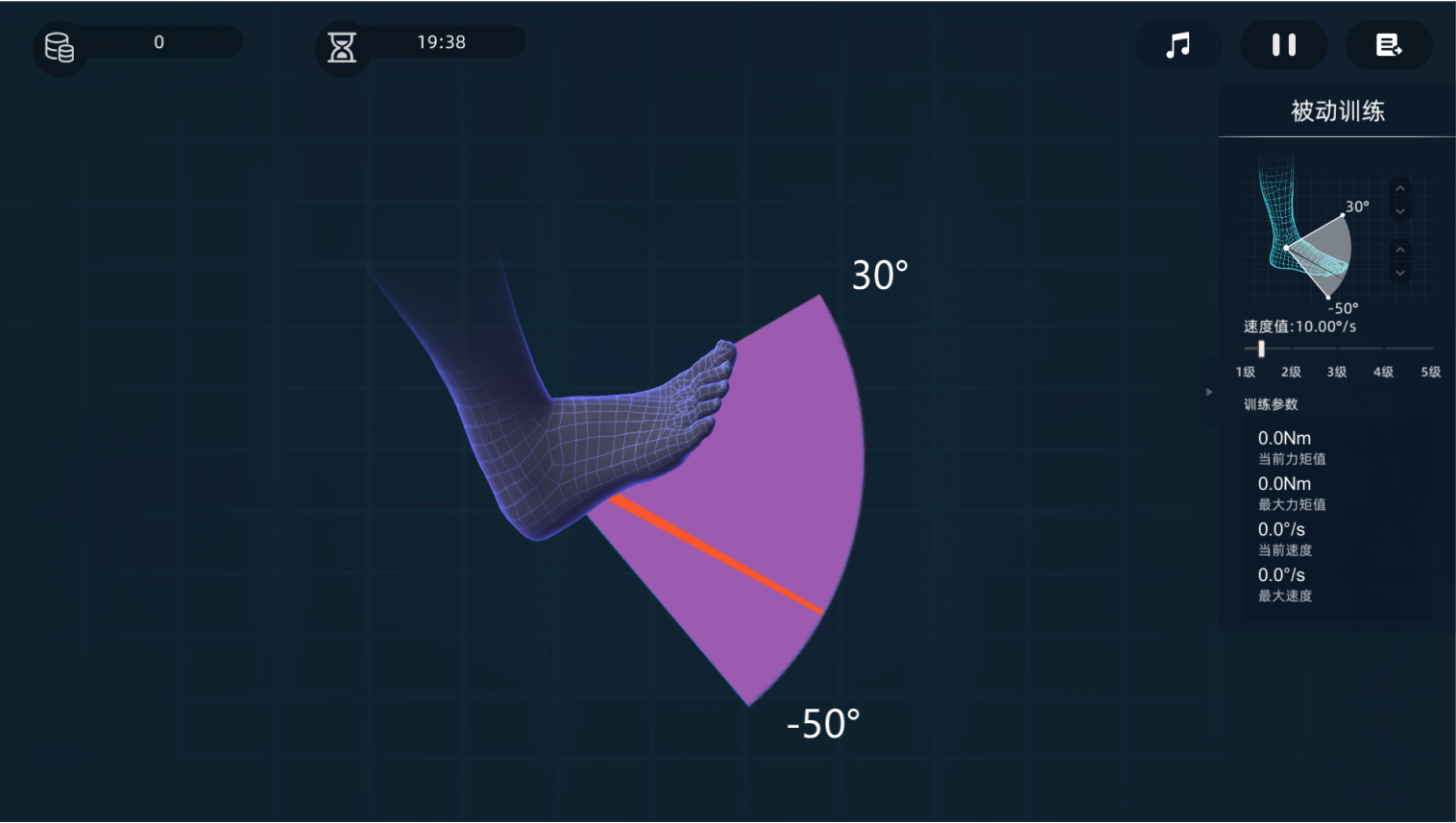
图2 M1A牵伸训练界面
主动训练中,根据受试者的肌力情况,M1A提供不同的训练范式(助力训练或抗阻训练)。受试者在前10分钟根据屏幕上显示的游戏任务,移动踝关节,捕捉对应角度的目标(如下图3);10分钟训练后,治疗师要求受试者转而注视踝关节,并给予一定的指导,去完成同样的训练容量。每当活动执行正确时,系统会播放音乐,并且治疗师会同时给予鼓励(听觉反馈)。
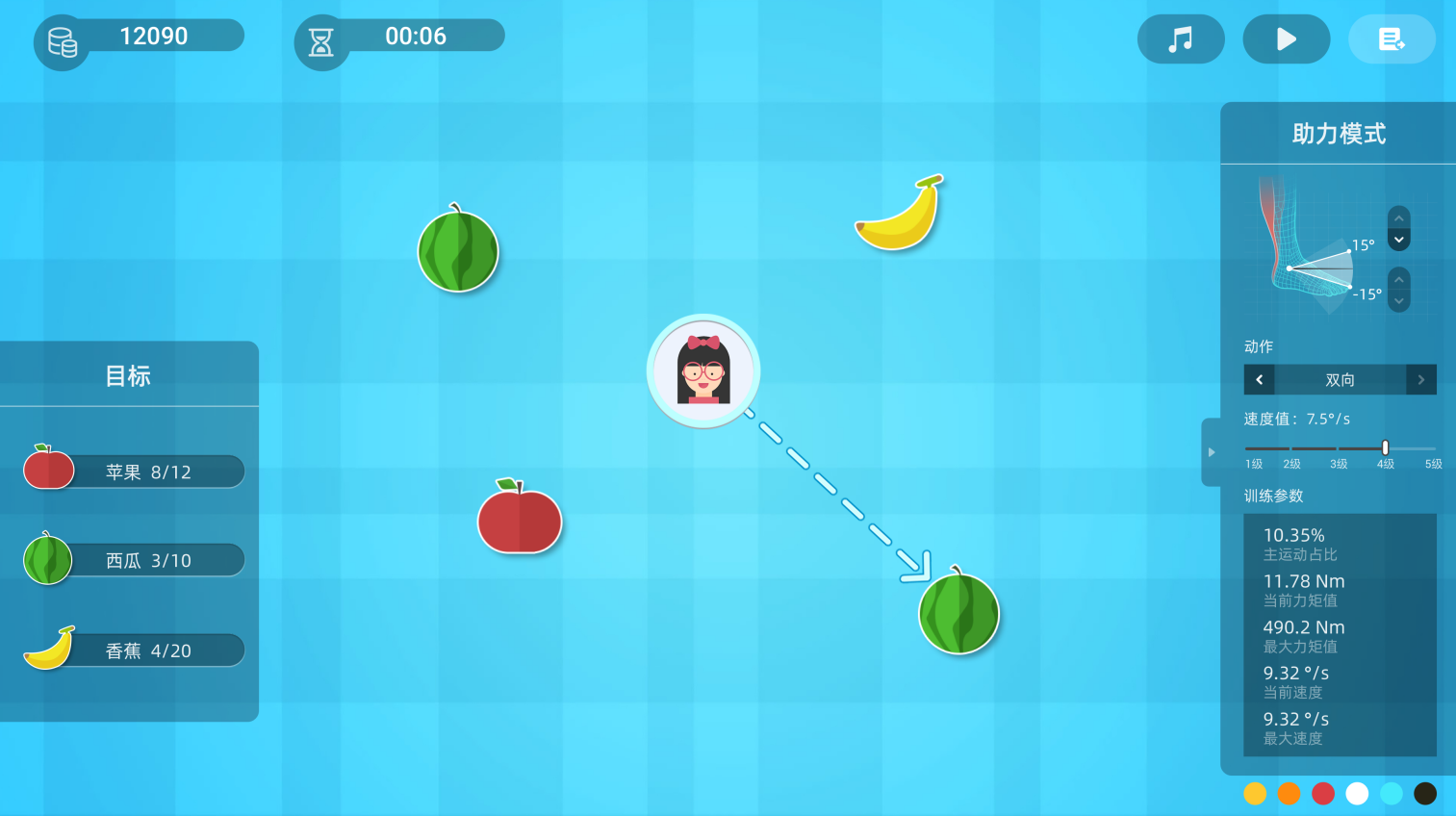
图3 M1A助力训练界面
03 结果
研究结果显示,在训练后,两组的10米步行时间均显著降低,而踝关节位置觉(joint sensitivity)、Berg平衡量表、Fugl-Meyer下肢量表、主动关节活动范围(AROM)和被动关节活动范围(PROM)均显著增加。与控制组相比,实验组的改善程度更高。
具体来说,实验前,实验者对两组受试者的基线特征(如下图4)进行评估,内容包括年龄、性别、中风类型、瘫痪侧、病史时间以及美国国立卫生院卒中量表(NIHHSS)评分。两组之间的基线特征在统计学上没有显著差异(p ≥ 0.05)。
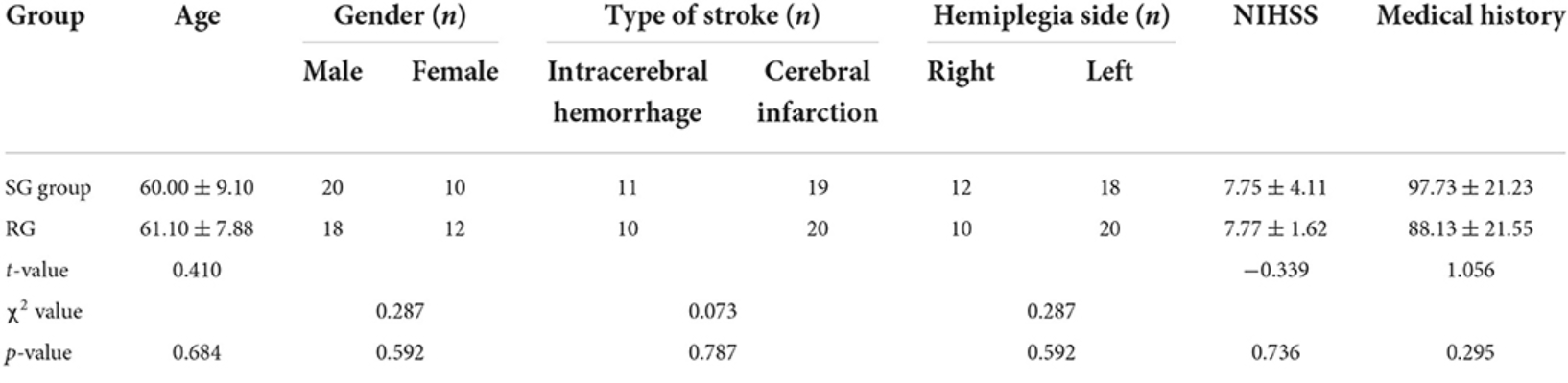
图4 两组受试者训练前生理状况比对
踝关节评定方面,两组在训练前的AROM、PROM和位置觉方面没有显著差异(p > 0.05)。训练后,组内比较显示,SG和RG的AROM和PROM均有统计学意义上的增长(p < 0.05),而位置觉的角度偏差量有统计学上的降低(−9.855,−22.75,9.798)(p < 0.05),这意味着两组指标均得到了改善。组间对比表明改善在统计学上没有显著差异,但实验组(SG)的改善效果更好。
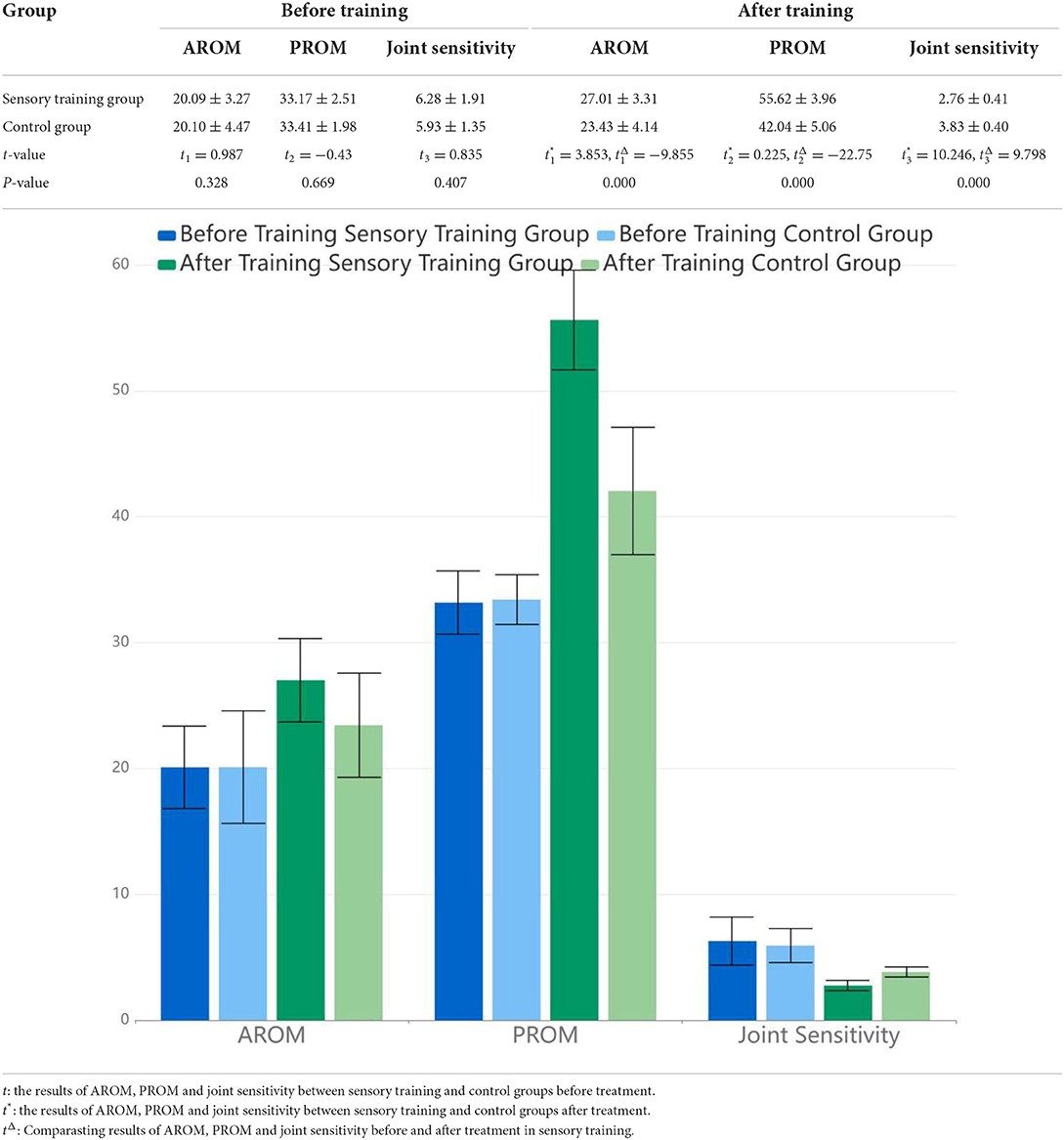
图5 实验组(SG)与控制组(RG)的AROM、PROM及位置觉参数训练前后参数对比
下肢功能评定方面,训练前两组在10米步行时间(10MWT)、Berg平衡量表(BBS)和Fugl-Meyer下肢评估(FMA-LE)方面没有显著差异。训练后,组内比较显示,RG组和SG组的BBS和FMA-LE均有统计学上的提升(p < 0.05),而10MWT有统计学上的降低(−29.359,−63.349,4.131)(p < 0.05),这意味着两组的运动功能均得到了改善。此外,组间比较显示,在10MWT、BBS和FMA-LE方面,实验组(SG)的改善效果更好,并且具有显著性(p < 0.05)。
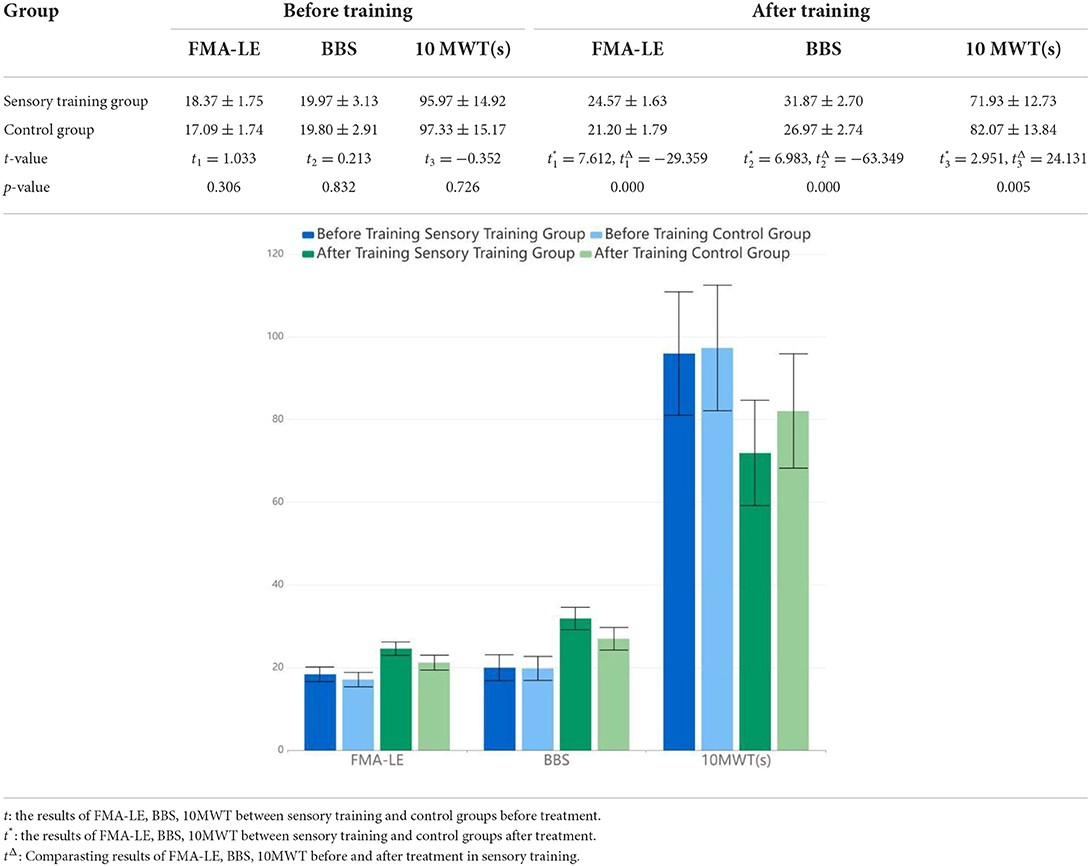
图6 实验组(SG)与控制组(RG)10MWT、BBS及Fugl-Meyer量表训练前后对比
04 讨论
实验组在感觉训练过程中通过视听觉反馈加强了本体感觉促进,获得了关节评定和下肢运动功能评定中更好的结果。这与M1A踝关节康复机器人能够准确评估AROM、PROM和位置觉,精确定位训练角度,并及时提供视听觉反馈刺激成正相关。不过值得辩证看待的是,改善受损本体感觉的关键仍然在于足够强度的训练,而非简单进行反馈限制或补偿。该研究的本体感觉训练模型是基于运动再学习(motor relearning)和重复刺激(repeated stimulation)的理论基础。
05 总结
本研究结果表明,利用M1A踝关节康复机器人进行本体感觉训练可以改善中风患者的本体感觉,并有效提高运动功能和步行能力。因此,在中风患者的康复过程中,建议重视本体感觉训练。这些研究结果对于促进中风患者的康复提供了有益的指导,并为康复治疗提供了新的方法和途径。
参考文献
Mao Y, Gao Z, Yang H, Song C. Influence of proprioceptive training based on ankle-foot robot on improving lower limbs function in patients after a stroke. Front Neurorobot. 2022 Oct 26;16:969671. doi: 10.3389/fnbot.2022.969671. PMID: 36386387; PMCID: PMC9643575.
原文链接:https://www.frontiersin.org/articles/10.3389/fnbot.2022.969671/full


